
GAMES101笔记:Lecture04 变换_续
二维情况的旋转变换
当一个矩阵的逆等于其转置时,这个矩阵被称为正交矩阵
Syllabus
- Viewing transformation
- View/Camera transformation
- Projection transformation
- Orthographic projection
- Perspective projection
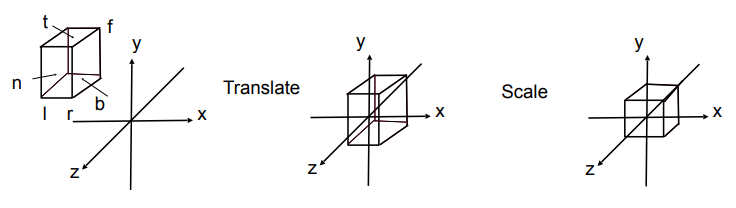
三维变换(3D transformations)
Scale
Translation
Rotation
绕单轴旋转:
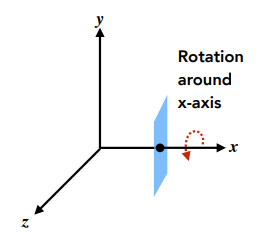
绕任意轴的旋转
分别绕 $x, y, z$ 轴旋转指定角度p
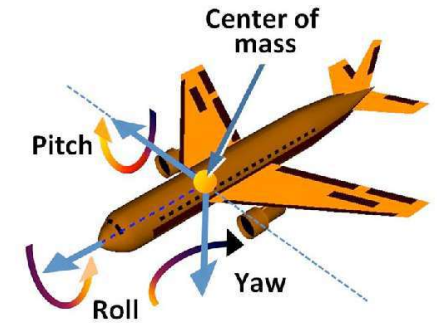
So-called Euler angles(欧拉角)
Often used in flight simulators: roll, pitch, yaw(如下图)
绕指定(过原点的)轴旋转指定角度
Rotation by angle $\alpha$ around axis $\mathbf{n}$ (罗德里德斯公式)
如何绕非过原点的轴旋转?
先将旋转轴移到原点,执行旋转,再平移回去
四元数
主要用于旋转插值
观测变换(Viewing transformation)
什么是观测变换?
思考照一张相的过程
- 寻找一个好的地方(模型变换(model transformation))
- 寻找一个好的角度(视图变换(view transformation))
拍照(投影变换(projection transformation)
简称MVP变换
(最后还有一个将正则化的正方体拉伸成屏幕画面大小的变换,被称为视口变换(Viewport transformation)
视图变换(View / Camera Transformation)
如何进行视图变换?
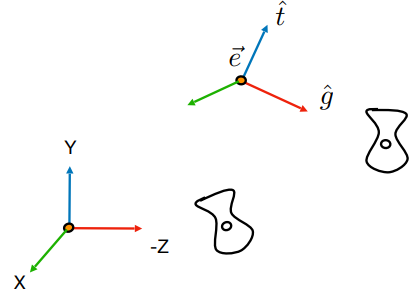
首先定义相机
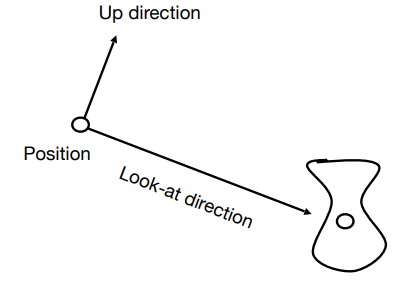
位置 $\vec{e}$
观测方向 $\vec{g}$
向上方向 $\hat{t}$
(假设与观测方向垂直)
关键的观察
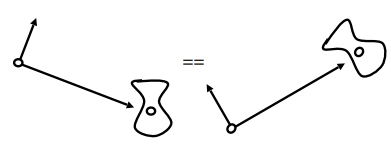
- 如果相机和被观测物体同时运动时,这张”照片“会是一样的
可以将相机的位置变换为:
- 固定在原点,向上方向为Y轴,向着-Z方向观察
- 然后将物体与相机一同变换
使用 $M_{view}$ 对相机施加变换
- 如此将相机摆放在原点,向上方向为Y轴,向-Z方向观察
$M_{view}$ 的数学描述
将 $e$ 平移到原点
将 $g$ 旋转到 $-Z$ 方向
将 $t$ 旋转到 $Y$ 方向
将 $(g\times t)$ 旋转到 $X$ 方向
(并不好写出来)
定义 $M_{view} = R_{view}T_{view}$
将 $e$ 平移到原点
将 $g$ 旋转到 $-Z$ , 将 $t$ 旋转到 $Y$ , 将 $(g\times t)$ 旋转到 $X$
考虑它的逆变换:将 $X$ 旋转到 $(g\times t)$ , 将 $Y$ 旋转到 $t$ , 将 $Z$ 旋转到 $-g$
由于旋转矩阵是正交矩阵,所以
代入
得
总结
- 将物体与摄像机一同变换
- 目标:将相机固定在原点,向上方向为Y轴,向着-Z方向观察
- 公式:
投影变换(Projection transformation)
Projection in Computer Graphics
- 3D to 2D
- Orthographic projection
- Perspective projection
正交投影与透视投影的区别
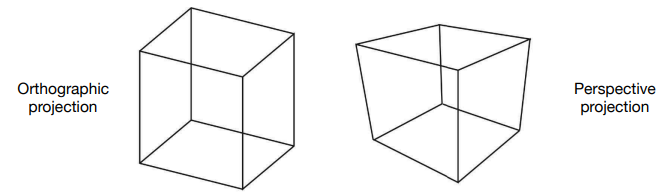
- 正交投影变换后的图片满足严格平行,但不符合人眼的观察原理
- 透视投影变换后的平行线会汇聚于一点,会有“近大远小”的现象
正交投影(Orthographic projection)
假设摄像机位于无限远的距离
一种简单的理解方法
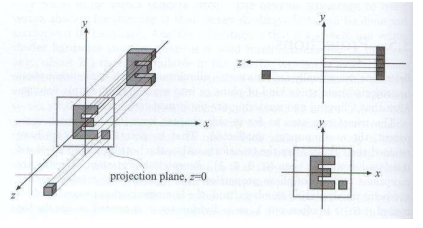
- 将相机固定在原点,向上方向为Y轴,向着-Z方向观察
- 将 $Z$ 轴坐标“丢掉”
- 然后将结果矩形平移并缩放到 $\begin{bmatrix}-1, 1\end{bmatrix}^2$
正规做法
将空间范围 $[l, r]\times[b, t]\times[f, n]$ 映射到”正则(canonical)”正方体 $[-1, 1] ^ 3$ 上
步骤:
- 将长方体(cuboid)的重心平移到原点
- 缩放到“正则”正方体大小
注意(一个不直观的定义):
- 将 $-Z$ 方向定义为“远”, $Z$ 方向定义为“近”
- 因为摄像机是朝向 $-Z$ 方向“看”的
变换矩阵(Transformation matrix)
先将重心平移(translate)到原点,再将长/宽/高缩放为2
注意:
$z$ 长度上缩放系数的分母是 $n - f$ , 因为 $n$ 的 $z$ 坐标大于 $f$ 的 $z$ 坐标
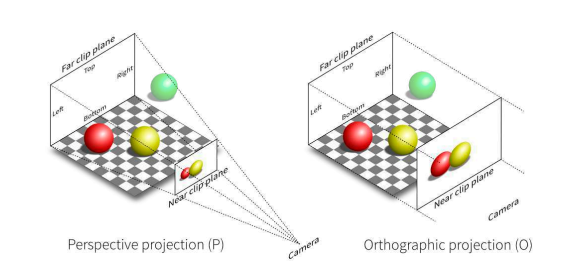
透视投影(Perspective projection)
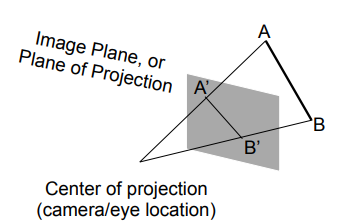
如上图,假设摄像机位于有限远的一点上,可视范围被称为视锥体(frustum),视锥体的一端为渲染范围的最远处,一端为投影平面(Plane of Projection)
利用到的齐次坐标性质:
$(x, y, z, 1)$ , $(kx, ky, kz, k)(k \neq 0)$ , $(xz, yz, z^2, z)(z \neq 0)$ 都表示在三维空间中的点 $(x, y, z)$
如何进行透视投影:
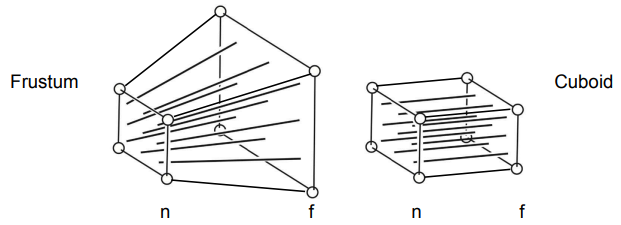
- 首先将视锥体”压缩”成一个长方体 $(n\to n),\ f\to f)\ (M_{persp\to ortho})$
- 再进行一次正交投影 ( $M_{ortho}$ )
几个规定:
- 近平面永远不变
- 对于远平面上的点,只有 $x,\ y$ 发生变化,而 $z$ 不变
- (位于中间的平面 $z$ 坐标可能会发生改变)
- 远平面的中心点坐标不变
如何寻找变换:
寻找变换后的点 $(x^\prime, y^\prime, z^\prime)$ 与原始点 $(x, y, z)$ 的关系
观察侧视图:
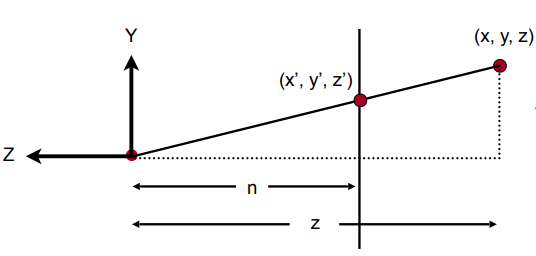
由图中的相似三角形可以得出:
同理:
用齐次坐标表示:
因此可以将 $M_{persp\to ortho}$ 的部分位置填写上
观察:第三行和 $z$ 有关
- 任何近平面上的点的坐标不会变化
- 任何远平面上的点的 $z$ 坐标不会变化
任何近平面上的点的坐标不会变化
所以第三行一定是 $\begin{pmatrix}0&0&A&B\end{pmatrix}$ 的形式,因为:
任何远平面上的点的 $z$ 坐标不会变化:
联立上式解出 A 和 B :
因此 $M_{persp\to ortho}$ 的每一项都得知了
总结
视口变换(Viewport transformation)(注1)
将空间 $[-1, 1]^2$ 变换到 $[0, width]\times[0, height]$ ,和正交变换的原理相同,只不过反过来,先缩放再平移:
总结
注1:此部分可参考下文